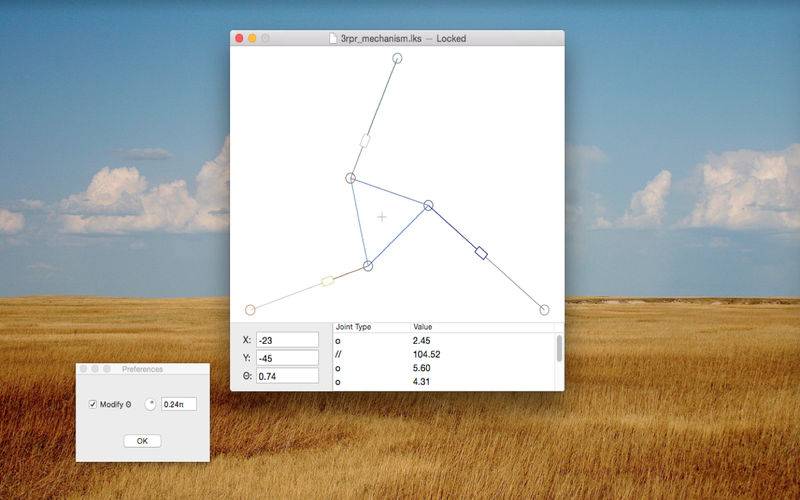
Linkages is an inverse kinematics app for planar mechanisms. Its main features are:
1. Demonstrations
Five-bar, Five-Bar 4R1P, 3RRR and 3RPR interactive parallel manipulator examples. Almost open-source.
2. Development
An engine based on Python ready to serve as an inverse kinematics experimentation framework. Write your own script in Python, specify your mechanism's structure via a Property List file and open it in Linkages. See the joints in action; enjoy robotics.
3. Documentation
Extensive documentation created with noweb. See the equation and script details together.